Moderne Embedded-Systeme haben sich in den letzten Jahren grundlegend verändert. Was früher als einfache, schleifenbasierte Programme in C begann, ist heute hochkomplexe Systemsoftware mit strengen Echtzeitanforderungen, vielfältiger Peripherie und parallelen Aufgaben. Ob in Fahrzeugsteuergeräten, industriellen Regelsystemen, der Medizintechnik oder in IoT-Gateways, überall müssen Embedded-Systeme zuverlässig, deterministisch und wartbar funktionieren.
Genau hier kommt ein Echtzeitbetriebssystem (Real-Time Operating System, RTOS) ins Spiel. Es bildet die Grundlage für strukturierte, skalierbare und echtzeitfähige Systemsoftware und ist längst kein „Nice-to-have“ mehr, sondern ein zentraler Baustein moderner Embedded-Architekturen.
Typische Herausforderungen moderner Embedded-Applikationen
Bevor wir uns ansehen, was ein RTOS leistet, lohnt sich ein Blick auf die typischen Probleme klassischer Embedded-Applikationen ohne Betriebssystem:
Echtzeit-Einschränkungen:
Steuerungs-, Regelungs- und Kommunikationsfunktionen müssen definierte Deadlines einhalten. Verspätete Ausführungen dürfen keinen Systemausfall verursachen.
Skalierbarkeit:
Superloop-Architekturen stoßen schnell an ihre Grenzen. Jede neue Funktion erhöht die Komplexität und verschlechtert die Übersichtlichkeit.
Geteilte Ressourcen:
Peripherie, Speicher und Bussysteme werden von mehreren Funktionen genutzt. Ohne saubere Zugriffskonzepte drohen Race Conditions und instabile Systeme.
Concurrency Management:
Regelkreise, Kommunikationsdienste, User Interfaces und Diagnosefunktionen müssen quasi parallel ablaufen.
Wartbarkeit und Wiederverwendbarkeit:
Monolithischer Code ist schwer zu debuggen, zu erweitern und in anderen Projekten wiederzuverwenden.
Ein RTOS adressiert genau diese Punkte systematisch und bietet bewährte Mechanismen, um Komplexität beherrschbar zu machen
RTOS als zentrale Systemsoftwareschicht
Architektonisch sitzt ein RTOS zwischen der Hardware-Abstraktionsschicht (HAL) und der Applikation. Es fungiert als Framework für die gesamte Systemsoftware und stellt grundlegende Services bereit:
- Task-Scheduling
- Inter-Task-Kommunikation
- Zeitsteuerung und Timing-Überwachung
- I/O- und Kommunikationsdienste
Durch diese klar definierte Schichtentrennung entsteht eine modulare Architektur, in der Anwendungssoftware deterministisch und nachvollziehbar aufgebaut werden kann.
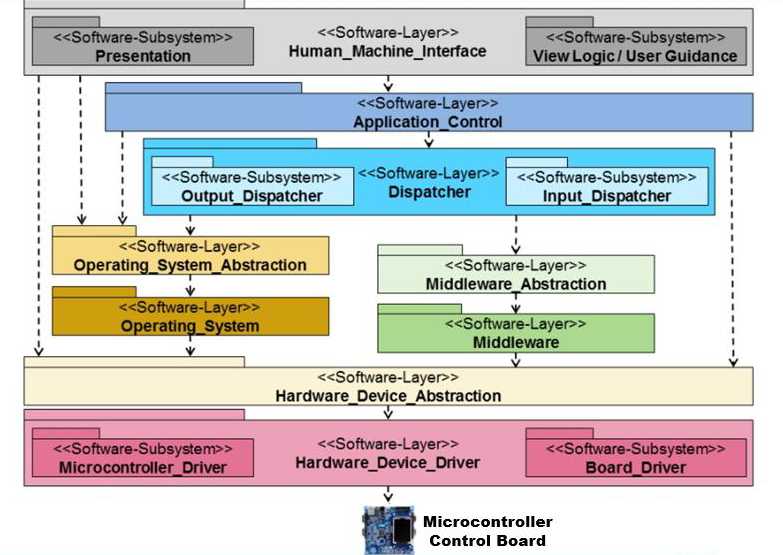
Bild 1: Schichtentrennung (Quelle: MicroConsult)
Von der Superloop-Logik zur taskbasierten Architektur
Ein zentrales Konzept eines RTOS ist die taskbasierte Dekomposition. Statt einer einzigen Endlosschleife (while(1)) wird die Anwendung in logisch getrennte Tasks zerlegt. Typische Beispiele:
- Task_A: Sensorerfassung
- Task_B: Regelalgorithmen
- Task_C: Kommunikationsstacks (CAN, SPI, UART, Ethernet)
- Task_D: Anwenderschnittstelle (User Interface UI)
- Task_E: Diagnose und Loggen von Tasks
Jeder Task besitzt eine klar definierte Aufgabe, eine eigene Priorität, einen separaten Stack und ein festgelegtes zeitliches Verhalten. Diese Modularität reduziert Kopplungen, verbessert die Timing-Vorhersagbarkeit und vereinfacht Debugging und Erweiterungen erheblich.
Deterministisches Scheduling und echtes Echtzeitverhalten
Die eigentliche Stärke eines RTOS liegt im deterministischen Scheduling. Die meisten RTOS-Kernels verwenden hierfür das prioritätsbasierte unterbrechende Scheduling:
- Tasks mit höherer Priorität unterbrechen Tasks mit niedrigerer Priorität. Wichtig dabei: In einem RTOS bezieht sich die Task-Priorität auf die Software-Priorität der RTOS-Scheduling-Software, nicht auf die Hardware-Priorität eines Interrupt-Controllers.
- Kritische Tasks erfüllen immer ihre Deadline.
- Die Worst-Case Execution Time (WCET) kann analysiert werden.
Ein RTOS garantiert unter anderem:
- Begrenzte Interrupt-Latenzen – Reaktionszeit verschachtelter Interrupts
- Definierte Context-Switch-Zeiten – erforderliche Zeit zum Sichern der verwendeten System-Ressourcen (z.B. CPU-Register) einer einzelnen Task
- Vorhersehbare Reihenfolge der Task-Ausführung – garantiert die Task-Sequenz/ Task Queue bei der der Task-Ausführung
Damit lassen sich Worst-Case Execution Times (WCET) analysieren und harte Echtzeitanforderungen zuverlässig erfüllen – ein Muss für sicherheitskritische Systeme wie Motorsteuerungen, Maschinen oder medizinische Geräte.
Sichere Inter-Task-Kommunikation und Synchronisation
In realen Systemen müssen Tasks miteinander kommunizieren und gemeinsam genutzte Ressourcen koordinieren. Ein RTOS bieten hierfür standardisierte Mechanismen:
Kommunikation: Queues, Mailboxes und Event Flags ermöglichen einen sicheren Datenaustausch zwischen Producer- und Consumer-Tasks.
Synchronisation: Semaphore, Mutex mit Prioritätsvererbung und kritische Abschnitte sorgen für kontrollierten Zugriff auf Ressourcen und verhindern Prioritätsumkehr oder Race Conditions.
Diese Services ersetzen fehleranfälliges Flag-Polling und tragen wesentlich zur Systemstabilität bei.
Präzises Zeitmanagement statt Busy-Waiting
Timing ist in Embedded-Systemen essenziell. RTOS stellen dafür zentrale Zeitdienste bereit, typischerweise basierend auf einem System-Tick (z.B. 1 ms):
- Delays mit definierter Auflösung
- periodische Task-Ausführung
- Timeouts für Kommunikationsdienste
- Watchdog-Servicing
Der große Vorteil: Tasks warten nicht aktiv (Busy-Wait), sondern geben die CPU frei. Das erhöht nicht nur die Deterministik, sondern auch die Energieeffizienz des Systems.
Klare Trennung von Interrupts und Applikationslogik
Ein bewährtes RTOS-Designprinzip ist die Trennung von ISR und Task-Kontext. Interrupt Service Routinen erledigen nur minimal notwendige, zeitkritische Aufgaben. Die eigentliche Verarbeitung erfolgt verzögert in Tasks, ausgelöst über Queues oder Semaphore. Das führt zu:
- geringerer Interrupt-Latenz
- besserer Systemreaktion
- vereinfachtem Debugging, effizienterer Timing-Analyse
Gerade in komplexen Systemen ist diese Struktur ein entscheidender Qualitätsfaktor.
Speicherstrategien für stabile Systeme
RTOS-basierte Systeme setzen häufig auf statische oder streng kontrollierte dynamische Speicherverwaltung. Typische Konzepte sind:
- private Task-Stacks
- Speicherpools fester Größe
- gezielter Einsatz von Heaps mit Fragmentierungskontrolle
So lassen sich unvorhersehbare Laufzeitfehler vermeiden, wie sie bei unkontrollierter dynamischer Speicherverwendung häufig auftreten.
Wartbarkeit, Portabilität und Zertifizierbarkeit
Langfristig zahlen sich RTOS-basierte Architekturen mehrfach aus:
- Wartbarkeit: klare Trennung von Aufgaben und Services
- Portabilität: Anwendungslogik bleibt über verschiedene MCUs hinweg nutzbar
- Zertifizierbarkeit: Viele RTOS erfüllen Normen wie IEC 61508, ISO 26262 oder DO-178C
Gerade in Automotive, Industrie und Luft- und Raumfahrt ist dies ein entscheidender Vorteil
Fazit: RTOS als Fundament moderner Embedded-Systeme
Ein Echtzeitbetriebssystem ist heute weit mehr als eine optionale Softwarekomponente. Es ist die Grundlage für zuverlässige, skalierbare und wartungsfreundliche Embedded-Systemsoftware.
Durch Tasks, deterministisches Scheduling, saubere Kommunikation, präzises Timing und kontrolliertes Ressourcen-Management verwandelt ein RTOS monolithische und fehleranfällige Strukturen in robuste Systemarchitekturen. Für Entwickler:innen bedeutet das: mehr Kontrolle, bessere Qualität und die Sicherheit, auch anspruchsvolle Echtzeitanforderungen zuverlässig zu erfüllen.
Echtzeit-Betriebssysteme gehören zu den wichtigen Disziplinen, die Embedded-Entwickler beherrschen sollten. Nutzen Sie das Know-How aus unseren Trainingsangeboten, um mehr darüber zu lernen.
Weiterführende Informationen
MicroConsult Training & Coaching zu Embedded- und Echtzeitbetriebssystemen
MicroConsult Fachwissen Embedded- und Echtzeit-Softwareentwicklung
Der MicroConsult-Newsletter
![]()
Wir informieren Sie mehrmals jährlich über Trends und Best Practices im Embedded Systems Engineering.
Erhalten Sie wertvolles Fachwissen und Tipps aus erster Hand von unseren Embedded-Experten!